【研究紹介】無人航空機(UAV)で切り開く多様で複雑な森林づくりのイノベーション
尾張 敏章(森林流域管理学研究室 北海道演習林)
※本記事は2024年11月10日発行のニュースレターmorikara4号に掲載されています
異齢混交林の管理にUAVを活用
多様な樹種・サイズの樹木で構成され、複雑な林分構造を持つ森林(異齢混交林)の管理が、気候変動への適応策として近年世界的に注目されています。欧州では「近自然型森林管理」として、EU森林戦略2030によりその普及が図られています。国内でも、現行の森林・林業基本計画において「複層林化と天然生林の保全管理の推進」が主要な施策の一つとされ、育成複層林の面積を増やす目標が掲げられています。多様で複雑な森林づくりを行うためには、林分や樹木の状態と配置に関する詳細で正確な情報が不可欠です。北海道演習林では、2014年から無人航空機(UAV: Unmanned Aerial Vehicle)(図1)を導入し、革新的な空間情報技術の異齢混交林管理への応用に関する研究を進めています1)。以下に、最近学術誌に掲載された2つの研究成果を紹介します。

図 1 北海道演習林技術職員によるUAV (DJI Matrice 300 RTK) での空撮の様子(撮影:延栄一)
針広混交林の林分パラメータを推定する
Karthigesuら2)は、UAV空中写真を用いて針広混交林の林分パラメータを推定し、その精度を改善する方法について検討しました。対象としたのは、16林班(面積158 ha)と65・66林班(301 ha)の2か所で、北海道演習林が2022年10月にUAV (DJI Matrice 300 RTK) で撮影したカラー(RGB)画像を使用しました。写真測量ソフトウェアを用いて林冠高モデルとオルソモザイク画像を生成し、毎木調査を行った計60プロット(50 m × 50 mの方形区)に対して、構造、テクスチャ、スペクトルの3種類の指標値をそれぞれ算出しました。線形重回帰とランダムフォレストの2つのモデルを用いて、7つの林分パラメータ(上層樹高、平均胸高直径、胸高断面積、林分材積、炭素蓄積量、立木本数密度、広葉樹比率)を推定した結果、いずれのモデルにおいても、3種類の指標値を組み合わせて適用することで推定精度が改善されました。
針広混交林内のミズナラを空から探索する
Htunら3)は、UAV空中写真と深層学習モデルを用いて、高価値広葉樹であるミズナラの樹冠抽出を行い、その精度を評価しました。ミズナラが比較的多く分布する針広混交林(68E小班、面積31 ha)を対象に、北海道演習林が2022年9月(黄葉前)と同年10月(黄葉後)に取得したRGB画像を用いて、深層学習モデルのResU-Net(画像認識データセットのImageNetで事前学習した畳み込みニューラルネットワークResidual Network 101をバックボーンとするU-Netモデル)で分析を行ったところ、いずれの月の画像においても高い精度でミズナラ樹冠を抽出でき、10月のRGB画像を用いた方が9月の画像に比べて精度は高くなりました(図2)。
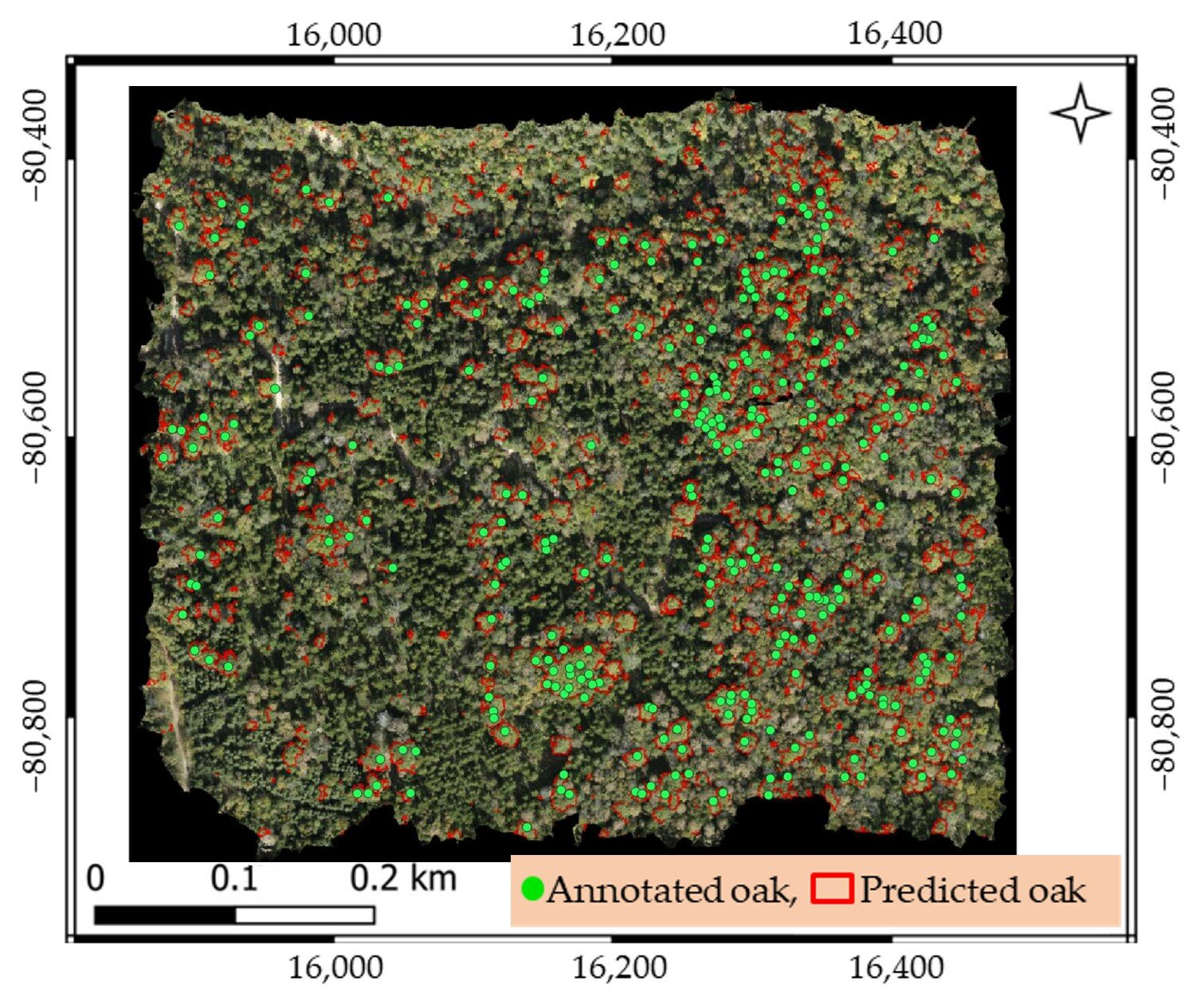
図 2 10月のUAV画像とResU-Netモデルを用いたミズナラ樹冠の抽出結果(図中の□)●は地上調査とUAV画像から判別した実際のミズナラの位置を示しています
Htun et al. (2024) より引用
UAV向けの様々なセンサが利用可能に
これら2つの研究では、どちらもUAVに搭載した高解像度カメラ(DJI Zenmuse P1)を使用して、上空から調査対象となる森林のRGB画像を撮影しました。一方で近年、RGBカメラとは異なる様々なセンサをUAVに搭載し、森林資源情報を把握する研究が増えています。北海道演習林でも、2023年にはマルチスペクトルカメラを搭載したUAV(DJI Mavic 3M)を、2024年にはUAVに搭載可能なLiDARセンサ(DJI Zenmuse L2)を新たに導入しました。これらの技術を活用して、異齢混交林の情報をより詳細で正確に把握するための研究を進めていきます。
引用文献
1) 尾張敏章(2020)林分施業法における航空機LiDARとUAVの利用可能性.北方林業,71:106-109
2) Karthigesu J, Owari T, Tsuyuki S, Hiroshima T(2024) Improving the estimation of structural parameters of a mixed conifer-broadleaf forest using structural, textural, and spectral metrics derived from unmanned aerial vehicle Red Green Blue (RGB) imagery. Remote Sens, 16(10): 1783
3) Htun N M, Owari T, Tsuyuki S, Hiroshima T (2024) Mapping the distribution of high-value broadleaf tree crowns through unmanned aerial vehicle image analysis using deep learning. Algorithms, 17(2): 84